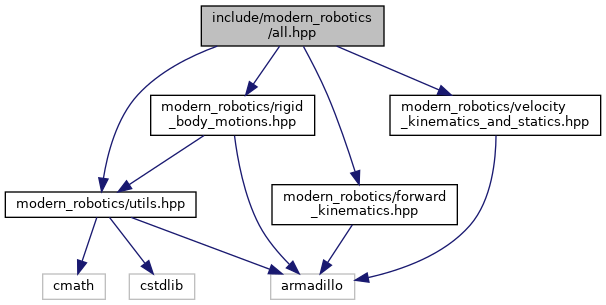
#include "modern_robotics/utils.hpp"#include "modern_robotics/rigid_body_motions.hpp"#include "modern_robotics/forward_kinematics.hpp"#include "modern_robotics/velocity_kinematics_and_statics.hpp"
Include dependency graph for all.hpp:
|
modern_robotics
|
#include "modern_robotics/utils.hpp"#include "modern_robotics/rigid_body_motions.hpp"#include "modern_robotics/forward_kinematics.hpp"#include "modern_robotics/velocity_kinematics_and_statics.hpp"